Beginning with its official introduction in 1983, the standard CAN Bus message frame used only an 11-bit message identifier (CAN 2.0A), which is sufficient for the use in regular automobiles and any industrial application, however, not necessarily for off-road vehicles.
The Society of Automotive Engineers (SAE) Truck and Bus Control and Communications Subcommittee had developed a family of standards concerning the design and use of devices that transmit electronic signals and control information among vehicle components. As a result, the higher layer protocol SAE J1939, based on CAN Bus, was born, which was required to provide some backward-compatible functionality to older RS485-based communication protocols (J1708/J1587).
To serve these demands, the CAN standard needed to be enhanced to support a 29-bit message identifier. The ISO 11898 amendment for an extended frame format (CAN 2.0B) was introduced in 1995.
The ISO 11898 Extension (CAN 2.0B)
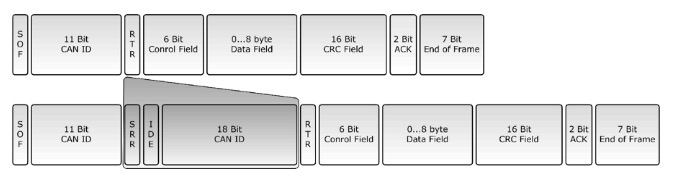
The 29-bit message identifier consists of the regular 11-bit base identifier and an 18-bit identifier extension. The distinction between CAN base frame format and CAN extended frame format is accomplished by using the IDE bit inside the Control Field. A low (dominant) IDE bit indicates an 11-bit message identifier, a high (recessive) IDE bit indicates a 29-bit identifier.
An 11-bit identifier (standard format) allows a total of 211 (= 2048) different messages. A 29-bit identifier (extended format) allows a total of 229 (= 536+ million) messages.
The above picture shows a comparison between a standard CAN data frame with an 11-Bit identifier and a CAN data frame in extended format (29-Bit identifier). Both frames contain an Identifier Extension Bit (IDE), which is at a low level for the standard frame and high for the extended data frame. CAN controllers must be designed in a way that they check the IDE to distinguish between the two possible frame formats.
Both formats, Standard (11-bit message ID) and Extended (29-bit message ID), may co-exist on the same CAN bus. During bus arbitration, the standard 11-bit message ID frame will always have higher priority than the extended 29-bit message ID frame with same 11-bit base identifier and thus gain bus access.
The Extended Format has some trade-offs: The bus latency time is longer (minimum 20 bit-times), messages in extended format require more bandwidth (about 20 %), and the error detection performance is reduced (because the chosen polynomial for the 15-bit checksum is optimized for frame length up to 112 bits).




")